 |
 |
MLPI-MotionLogicProgrammingInterface(mlpi4Java)
1.26.2
|
Inherits com.boschrexroth.mlpi.MlpiComponent.
Classes | |
| class | GroupRef |
| class | RobotAxisConfiguration |
| enum | RobotAxisTypes |
| class | RobotBeltConfigValues |
| class | RobotBeltErrorReactionValues |
| class | RobotCmdInfo |
| enum | RobotCmdInfoType |
| enum | RobotCoordinateSystem |
| class | RobotCoordinateSystemInfo |
| enum | RobotCSType |
| enum | RobotCyclicMode |
| class | RobotInformation |
| class | RobotKinematicsUnits |
| class | RobotKinematicsValues |
| class | RobotMechanicData |
| enum | RobotMechCmd |
| class | RobotMotionHandle |
| class | RobotPerformanceResult |
| class | RobotSafeZoneData |
| enum | RobotSafeZoneType |
| enum | RobotSetMode |
| enum | RobotSlopeType |
| class | RobotStatusSummary |
| class | RobotStatusSummaryIn |
| enum | RobotSyncErrorReactionMode |
| class | RobotTrafoParameter |
| enum | RobotTypes |
Public Member Functions | |
| Group | groups (short groupNo) |
| synchronized Group | groups (int groupNo) |
| RobotPoint | CreatePoint (double point[], Robot.RobotCoordinateSystem type) |
| native RobotInformation[] | GetConfiguredGroups () |
| native RobotKinematicsValues[] | GetKinematicsValues (GroupRef[] groups) |
| native RobotKinematicsUnits[] | GetKinematicsUnits (GroupRef[] groups) |
| native RobotStatusSummary[] | GetStatusSummary (RobotStatusSummaryIn[] statusSummaryIn) |
Class definition of the mlpiRobotLib.
This robot library provides functionality for defining a robot, commanding motion and getting robot information.
The following functions all deal with the motion of a robot. In general, "robot" is used to address a robot. Each motion command usually uses a structure to pass on the information about a particular move. The command will be executed in the control and returns a handle. This handle must be used in future requests for getting status information. The handle and the robot reference a particular motion command. One robot can have multiple active commands (for example, MoveLinearAbs is one and a MoveLinearRel is commanded). A previous commanded move will not be interrupted by a move currently executed. All moves will be executed consecutively.
Definition at line 84 of file Robot.java.
|
inline |
This method returns the group object with the given number.
| [in] | groupNo | Number of the robot/group/kinematic. |
Definition at line 904 of file Robot.java.
Referenced by com.boschrexroth.mlpi.Robot.CreatePoint().

|
inline |
This method returns the group object with the given number.
| [in] | groupNo | Number of the robot/group/kinematic. |
Definition at line 912 of file Robot.java.
|
inline |
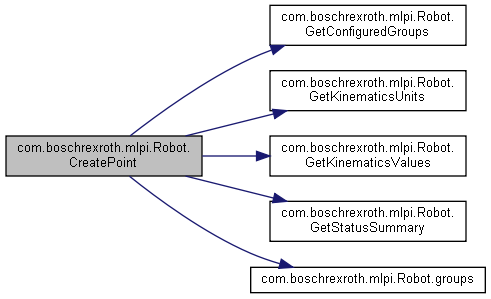
This method returns a new RobotPoint object with the given parameters.
| [in] | point[] | values for the field of the point. |
| [in] | type | coordinate system for the point. |
Definition at line 934 of file Robot.java.
References com.boschrexroth.mlpi.Robot.GetConfiguredGroups(), com.boschrexroth.mlpi.Robot.GetKinematicsUnits(), com.boschrexroth.mlpi.Robot.GetKinematicsValues(), com.boschrexroth.mlpi.Robot.GetStatusSummary(), and com.boschrexroth.mlpi.Robot.groups().
| native RobotInformation [] com.boschrexroth.mlpi.Robot.GetConfiguredGroups | ( | ) |
This method returns all robots.
mlpiParameterReadDataArrayUshort C-0-2484, where you can find further documentation. Referenced by com.boschrexroth.mlpi.Robot.CreatePoint().

| native RobotKinematicsValues [] com.boschrexroth.mlpi.Robot.GetKinematicsValues | ( | GroupRef[] | groups | ) |
This function fills an array of KinematicsValues structures. Use the group element of the structure to specify the kinematics for which information should be read. You may want to use this structure to read several sets of kinematics information for several kinematics using one single function call during operation of the kinematics. This provides increased performance in comparison to reading the values bit by bit and kinematics by kinematics.
| [in] | groups | Reference to all robots. |
mlpiRobotGetKinematicsValues, where you can find further documentation. Referenced by com.boschrexroth.mlpi.Robot.CreatePoint().

| native RobotKinematicsUnits [] com.boschrexroth.mlpi.Robot.GetKinematicsUnits | ( | GroupRef[] | groups | ) |
This function returns the current unit settings of an array of kinematics in string representation. Use it to read the unit settings for display in an HMI.
| [in] | groups | Reference to all robots. |
mlpiRobotGetKinematicsUnits, where you can find further documentation. Referenced by com.boschrexroth.mlpi.Robot.CreatePoint().

| native RobotStatusSummary [] com.boschrexroth.mlpi.Robot.GetStatusSummary | ( | RobotStatusSummaryIn[] | statusSummaryIn | ) |
This function will return Info about a Kinematic
| [in] | StatusSummaryIn | Structure containing all information necessary for the command. |
mlpiRobotGetStatusSummary, where you can find further documentation. Referenced by com.boschrexroth.mlpi.Robot.CreatePoint().


