 |
 |
MLPI-MotionLogicProgrammingInterface(mlpi4Java)
1.26.2
|
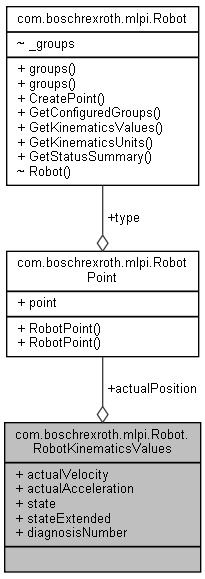
Structure containing operation information about an kinematic. These values do change as soon as the kinematic is in operation. You may want to use this structure to read several sets of kinematics information using one single function call during operation of the kinematics. This provides increased performance in comparison to reading the values bit by bit. Especially when reading the values for multiple kinematics.
Elements of class RobotKinematicsValues
| Type | Element | Description |
|---|---|---|
| RobotPoint | actualPosition | Actual position of the kinematics. |
| double | actualVelocity | Actual velocity of the kinematics. |
| double | actualAcceleration | Actual acceleration of the kinematics. |
| int | state | Kinematics state of the kinematics. |
| int | stateExtended | Extended kinematics state of the kinematics. |
| int | diagnosisNumber | DiagnosisNumber of the kinematics. |
Definition at line 700 of file Robot.java.

