 |
 |
MLPI-MotionLogicProgrammingInterface(mlpi4COM)
1.26.2
|
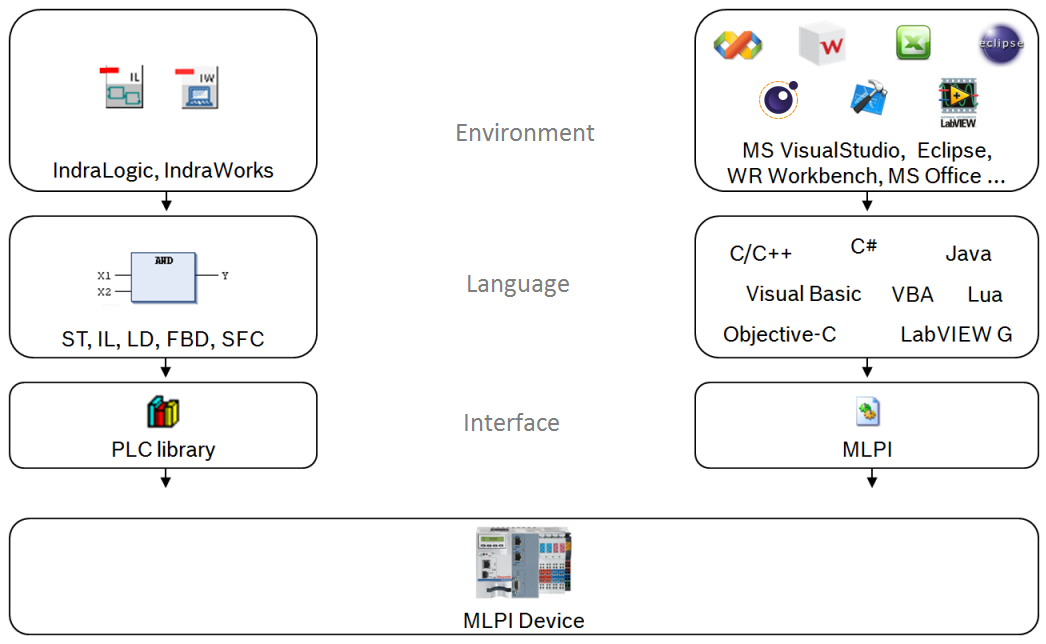
The mlpi4COM (Motion Logic Programming Interface - Component Object Model) is a programming interface which is based on Microsoft COM (Component Object Model) technology. It exposes various interfaces to access the different features of a Bosch Rexroth IndraMotion MLC or IndraControl XLC. It is available for x86 and x64 platforms. This SDK contains a dll-library, this documentation and some sample code.
This section contains information and various notes about the installation of the MLPI. Please read this before starting to use the MLPI.
To use the MLPI, you need to install the following packages:
Listed below are some directories you might want to know about.
<install> = The directory where you installed the mlpi4COM SDK.
<install>\bin\win-vs2005sp1-x86 <install>\bin\win-vs2005sp1-x64 <install>\bin\wince-vs2005sp1-x86 <install>\doc <install>\samples Tools->Options->Projects And Solutions->VC++ Directories. In the left combobox called Platform, you have to select Win32. In the right combobox, choose Include Files and add the path to your <install>\include directory. Do the same for the Library Files, but insert the path to your <install>\lib path. 
Learn how to set up a simple application. Based on the platform where you want to run the executable of your application, this section is divided into two subpages.
Following the above steps, you should have successfully...
Congratulations, you should have now all the basics to start developing your own application for the MLPI. For more information, have a look at the other pages of this documentation and look for the sample applications which are located in the samples path of your MLPI-SDK installation directory. All the non MLPI related documentation (Indralogic PLC, Fieldbusses, PLC-Open, Indradrive, etc...) can be found in the IndraWorks Suite installation.
For the latest information, please visit the BoschRexroth website. http://www.boschrexroth.com/oce

